
Abstract
Wayfinding is generally understood as the process of purposefully navigating to distant and non-visible destinations. Within this broad framework, uninformed searching entails finding one’s way to a target destination, in an unfamiliar environment, with no knowledge of its location. Although a variety of search strategies have been previously reported, this research was largely conducted in the laboratory or virtual environments using simplistic and often non-realistic situations, raising questions about its ecological validity. In this study, we explored how extant findings on searching translate to a real-world environment, using a phenomenologically informed experiment. Our findings demonstrate a previously undescribed complex and dynamic interplay of different search strategies. Importantly, our results reveal that: (i) the presence of other people is importantly entangled with the process of searching; and (ii) people frequently probe and switch between search strategies based on local environmental characteristics. Together, our results reveal that search behaviour is critically dependent on environmental features and that searching in complex real-world settings should not be conceptualised as depending on a simple singular strategy. This raises questions about the dominance of laboratory-based experiments and their narrow cognitivist framework, highlighting the value of studying wayfinding in the real world.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Spatial navigation, the goal-directed travel through space, is an essential everyday skill and one of the most fundamental real-world applications of cognition. Montello (2005) defines navigation as consisting of two main components: locomotion and wayfinding. While locomotion relates to coordinated movements in response to sensory-motor input, wayfinding involves planning, decision-making and memory to “find one’s way” to distant locations beyond the current sensory horizon.
The term wayfinding subsumes a variety of navigation tasks which can be classified based on the navigator’s knowledge (Wiener et al., 2009). There are many different definitions and classifications of wayfinding. In this paper, we conceive of wayfinding through Wiener et al’s (2009) taxonomy of wayfinding tasks. In this taxonomy, wayfinding is split into aided wayfinding (i.e., with the help of navigation assistant systems) and unaided wayfinding. Unaided wayfinding is further split into undirected wayfinding (without a specific destination) and directed wayfinding (with a specific destination). Directed wayfinding is further split into target approximation (where navigators have knowledge about the destination) and search (where navigators do not have knowledge about the destination). Finally, based on whether navigators know the environment, search can be further split into informed search (with knowledge of the environment) and uninformed search (without knowledge of the environment). Much extant wayfinding research is focussed on target approximation which includes behaviours such as route following and route planning (Hartley et al., 2003; Waller & Lippa, 2007). Navigational search tasks, in contrast, have received comparatively little attention in the literature and the cognitive strategies navigators employ to solve such search tasks, in either familiar environments (informed search) or unfamiliar environments (uninformed search), are not well understood. This study is focussed on uninformed search, wherein the environment is unfamiliar.
1.1 Uninformed searching
Previous studies investigating search behaviour and strategies have mainly focused on small scale environments such as large rooms or clearly defined parts of a larger environment, both of which can, in principle, be experienced from a single vantage point (so-called vista scale spaces; Montello, 1993). Gilchrist et al. (2001), for example, studied whether principles of visual search translate to search involving body movements in vista-scale spaces. In their experiment, participants searched for a target hidden in one of multiple small containers arranged in a regular array. In contrast to visual search, revisits and rechecking of containers were rare in the navigation conditions, suggesting that participants aimed to minimise costs associated with physical movements as compared to eye movements (see also Ruddle & Lessels., 2006; Smith et al., 2008).
To minimise costs involved in physical search, people employ strategies that essentially aim to reduce or minimise oversampling, i.e. the revisiting areas which have already been searched. Tellevik (1992), who in an experiment asked blindfolded participants to find target objects in a room-sized environment, described three main strategies: the grid-like strategy, the reference point strategy, and the perimeter strategy. The grid-like strategy is equivalent to the lawn-mower strategy, i.e., participants follow a regular pattern, slowly moving from one part of the environment to the other (see also Riggs et al., 2017). In the reference-point strategy, participants choose a reference point, explore a section of the space, then return to the reference point before exploring a different section. Finally, in the perimeter strategy participants explore the edge or perimeter of the environment before searching the central part.
So far, few studies have investigated navigational search strategies in large environmental-scale spaces such as complex buildings, university campuses, or parts of cities (Montello, 1993). In such spaces, grid-like or lawn-mower strategies are thought to be not applicable. In one notable study, Büchner et al. (2009) asked participants to find an object in a large, complex and unfamiliar virtual environment and provided evidence for the perimeter strategy. In the experiment, target objects were either placed in the centre of the environment or at the perimeter. Even though the central target location was closer to the start location, participants took longer to find it than if it was placed at the perimeter. Inspection of participants’ trajectories confirmed that they often explored the perimeter before the central area of the environment.
Although Büchner and colleagues provided compelling evidence for the use of a perimeter strategy, they used large and artificially complex virtual indoor mazes, which were uniformly coloured and empty, without any distinctive landmarks or windows which would have helped with orientation (O’Malley et al., 2022; Yesiltepe et al., 2021). Moreover, Büchner et al. (2009) used a non-immersive VR setup, presenting the virtual environments on computer screens, and participants navigated by pressing arrow keys, raising questions about the ecological validity of the findings. In fact, all studies reviewed above investigated navigational search behaviour in somewhat artificial situations, either because of the (small) scale of the environment and/or the use of virtual environment technology, with the aim to minimise the influence of extraneous variables. It is therefore unclear how results from these studies translate to search behaviour in large-scale, real-world settings.
1.2 Searching in the real world
There are a number of reasons why studies in small-scale, laboratory, or virtual environments might not translate well to the real world. First, navigation is a complex behaviour based on a dynamic interplay of multiple cognitive components and mechanisms. This relies on information from different sensory cues, might involve creating and maintaining enduring and transient spatial representations (Wolbers & Hegarty, 2010), and might involve recruitment of external elements to enhance or constitute cognitive processes (Hutchins, 1995). However, many sensory cues available in the real world are absent from laboratory or virtual environments, questioning the usefulness of such situated studies. For example, although there is some evidence that some virtual wayfinding performances correlate with real-world equivalents (Coutrot et al., 2019), the consistency between virtual and real-world navigational performance depends on a range of factors including the type of navigational task being tested and the particular design of a study.
Second, most navigation tasks can be solved using a range of strategies. When learning novel routes, for example, navigators can memorise the sequence of turns from the start to the destination, associate directional changes with landmarks at decision points, select and memorise suitable environmental features at decision points that act as beacons to guide navigation, or switch between strategies (Waller & Lippa, 2007). Thus, inferring the navigation strategies underlying different navigation tasks in real-world environments using purely quantitative approaches in laboratory or virtual environments is very difficult.
To mitigate some of these issues, mixed-methods approaches have been used in the study of wayfinding strategies. In particular, some researchers have included retrospective participant accounts to enrich behavioural or neuroimaging data. Hölscher et al. (2006), for example, asked participants to think aloud while solving wayfinding tasks. Verbal comments during navigation and participant-reported strategies were then classified and compared using frequency analysis. Importantly, Hölscher and colleagues showed that objective trajectory choices were closely related to the subjective verbal description of wayfinding decision and strategies, that participants used a variety of strategies, that different strategies were used when navigating to various locations, and that strategy choice depended on participants knowledge of the environment.
A similar approach was taken by Tenbrink and Wiener (2007), who asked participants to plan and navigate the shortest possible route to connect nine target locations in a room-sized environment (Travelling Salesperson Problem: TSP). In such tasks it is difficult to analyse the chosen strategy simply by studying the resulting trajectories, as different strategic approaches can lead to similar trajectories. However, participants’ retrospective reports on how they solved the task linked to chosen trajectories and revealed a series of planning strategies.
Finally, in a functional neuroimaging and eye-tracking study, Spiers and Maguire (2006, 2008) asked London taxi drivers to plan and navigate routes through a virtual model of London. The taxi drivers were able to produce detailed retrospective accounts of their thoughts and decisions during navigation while watching a video of their recorded navigation episodes. Importantly, taxi drivers' detailed verbal accounts of what they were thinking were not only validated by the eye-tracking (Spiers & Maguire, 2008) and functional neuroimaging data (Spiers & Maguire, 2006), but also enriched our understanding of the psychological processes involved in navigation.
Although, as demonstrated above, the results from mixed-methods wayfinding studies have helped to develop understanding of wayfinding strategies, such approaches remain scarce and most experiments are still conducted in laboratory settings. Therefore, we argue that both (i) incorporating qualitative methods into experimental approaches, and (ii) conducting research in real-world environments, have the potential to improve our understanding of the cognitive strategies that influence and underly everyday navigation in complex built environments.
1.3 The present study
Given the lack of understanding of search strategies in real-world environments, the aim of this study is to explore the cognitive strategies and environmental factors involved in searching for targets in an unfamiliar and complex real-world environment. This study represents a first attempt from our longstanding wayfinding research group to conduct research outside the laboratory. To support this change in approach, we used the same experimental manipulation used by Büchner et al. (2009) but in a busy real-world built environment. Specifically, we studied whether participants made use of the perimeter strategy when searching for a target location in an unfamiliar university campus. In addition, we incorporated qualitative methods into the experimental design in order to explore how participants reflect on and account for their approach to the task.
2 Methods
2.1 Design
The study is a phenomenologically informed experiment. The experiment is a between-subjects design, with participants being randomly assigned to either the centre or perimeter condition (detailed description below). The experiment is phenomenologically informed in two ways. First, through a frontloaded approach (Gallagher, 2003; Zahavi, 2019), in which phenomenological insights – such as the embodied and embedded nature of cognition – inform the ecologically sound study design. Second, through a reflexive approach (Feest, 2021), in which participants can reflect on the nature of their experiences during the task, adding a first-personal perspective to the study.
2.2 Participants and study setting
Thirty-six participants were recruited for the current study, via the participation pool in a university psychology department, and were compensated for their time with course credits. The study was held on an adjacent university campus and required participants to be unfamiliar with the location. None of the participants had visited the campus before the experiment. The participant pool was limited to those with normal or corrected-to-normal vision.
2.3 Materials and procedure
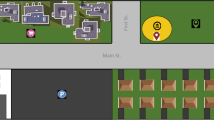
Participants were met by the researcher at a pre-arranged location. They were provided with an information sheet detailing the study and provided informed consent before continuing. The researcher then led the participant to start-point on the campus (See Fig. 1).

The participants’ navigation task was to search for a target object: a yellow star printed on an A4 sheet of paper and attached to an outside wall of a building on the campus. Participants were not provided with any information about the star’s location, other than it was on campus placed at eye-level and not inside any building. The star was either located on a building at the perimeter of the campus (perimeter condition) or in the centre of the campus (centre condition, see Fig. 1). The task ended once the participant located the target or after participants searched for 20 min without locating the target. Participants were instructed verbally and shown a copy of the star. The researcher (MA) started a timer when participants began their search and followed behind them, tracing their trajectory and behaviours on a printed map of the campus. The researcher noted when and where each participant stopped, turned around and was visibly looking around the environment. Participants’ comments were also noted to inform subsequent interviews.
Following the completion of the search task, participants were walked back to the start-point. After reconfirming the participant’s agreement to be audio-recorded, a walking interview was conducted (Kinney, 2017). Walking interviews are particularly suited to explore phenomena entangled with the environment because environmental cues may prompt memories and feelings (Cao et al., 2019; Stals et al., 2014). During the walking interview, participants retraced their trajectory with the researcher. Although unstructured, the interview encouraged participants to share how they approached the task and what strategies they adopted. Questions were also informed by behaviours and comments recorded during the search task. For example, if the participant had paused and mentioned they felt lost during the task, the researcher would refer to this during the interview. Following the completion of the interview, the researcher escorted the participant back to the initial meeting point.
2.4 Data analysis
A basic statistical analysis of the behavioural data was initially conducted to compare the centre and perimeter conditions. This analysis focused on the time taken to complete the task, the distance travelled, and number of navigational behaviours used. We chose to focus on behaviours that have been associated with wayfinding (Ahmed et al., 2020; Rousek & Hallbeck, 2011), including the number of stops participants made, the number of times they turned around, and how often they looked around the environment. Stopping was defined as halting movement through the environment, whether for a short hesitation or a longer pause. Turning around was defined by either turning back on entering an area that was a dead end, which forced participants to turn around. Finally, looking around was defined by participants visibly looking around or gazing at features within the environment, either when walking or whilst stopped (Ito & Sano, 2011). These behaviours were then put into the geospatial information system QGIS (v3.16) to create a visual representation of where in the environment these behaviours were occurring.
A subset of thirty-three participant interview recordings were transcribed verbatim (three of the participant interviews were unusable or did not occur for external issues). All audio recordings were destroyed at the earliest opportunity. We then conducted a thematic analysis of the interview transcripts to identify any patterns of meaning which emerged from the data (Braun & Clarke, 2006; Thomas, 2006). After becoming familiar with the raw data, we began to establish some initial codes which provided a broad idea of how the participants had approached the task. The codes were eventually narrowed down to establish themes and sub-themes.
2.5 Ethics
General ethical guidance was taken from the British Psychological Society (BPS) Code of Human Research Ethics (British Psychological Society, 2021). Ethical approval was gained from the university’s ethics committee (Ethics ID: 41335). Participants in the study were provided with a Participant Information Sheet (PIS) prior to taking part. Before taking part, participants provided consent to take part in the study and for the interview to be digitally audio-recorded. All data was stored securely on the university server. A risk assessment was conducted before any research took place, outlining potential risks and mitigation measures for participants and researchers.
3 Results
3.1 Behavioural data
Table 1 summarises the descriptive statistics of the behavioural data. The behavioural data consists of route length, time taken to complete the task, the number of stops participants made (S), the number of times they turned around (TA), and how often they looked around the environment (LA). Given the lack of difference between the two conditions for both route length and time taken, it was not necessary to normalise the observed behaviours. Instead, we have presented the totals for each.
In line with earlier research (Büchner et al., 2009), we predicted improved search performance when the target was located on the perimeter of the environment, suggesting a preference for perimeter strategies. However, an independent samples t-test did not support this hypothesis for route length (t(34) = 0.39, p = 0.70) or time taken to complete the task (t(34) = 0.01, p = 0.99). Note, however, that the variance in both measures is very high, highlighting that in both conditions some participants found target locations much quicker using very short routes compared to other participants. Similarly, no significant difference was found between the perimeter and centre condition for the number of times participants turned around (t(34) = 0.30, p = 0.76) or stopped (t(34) = 0.84, p = 0.42). We did, however, find that participants in the centre condition looked around the environment significantly more than in the perimeter condition (M = 9.11, SD = 4.04 vs M = 5.94, SD = 2.50; t(34) = 2.75, p = 0.01).
As there was little difference between the two conditions, we decided to pool the two data sets for further analyses and created four heat maps, using QGIS, which provide visual representations of locations within the environment that prompted participants to perform the recorded behaviours. It also allowed us to visualise the paths which were frequently used by participants, as seen in Fig. 2. This representation highlights that participant preferred more central paths, further disputing the hypothesis that they would primarily rely on a perimeter strategy.

Campus map illustrating paths frequently used by participants (Google, n.d.)
Figure 3 highlights several locations where participants frequently looked around and stopped. Most of these hotspots were in areas which acted as decision points. Furthermore, participants looked around more frequently when they were in more enclosed areas, such as courtyards or spaces between buildings, which could reflect participants having to put more thought into where they plan to go.

Heat map illustrating locations where participants frequently looked around (left) and stopped (right, Google, n.d.)
Finally, Fig. 4 highlights locations where participants turned around. Unsurprisingly, areas which act as a dead end forced participants to turn around. Interestingly, hotspots also formed where the pathways connect the perimeter and centre of the campus. However, it is unclear from the map alone whether this is from participants turning away from the perimeter or avoiding the centre.

Heat map illustrating locations where participants frequently turned around (Google, n.d.)
3.2 Qualitative data
Following analysis of the behavioural data, our thematic analysis of the participant interviews revealed interesting patterns of meaning. We present this analysis through two main themes – using search strategies and environmental influences – and five sub-themes, which help to understand how participants approached the search task (see Fig. 5).

Theme map
3.2.1 Using search strategies
The first theme – using search strategies – highlights the ways in which participants accounted for how they approached the search task. Participants used a range of different strategies (including the perimeter strategy), they switched between strategies based on several factors, and in some instances relied on no explicit strategy at all. Within this theme we identified three subthemes: a variety of strategies; altering initial plans; and using unique features.
A variety of strategies
Participants reported a variety of strategies when asked how they approached the task. In line with Büchner et al.’s (2009) original study, several participants reported using a perimeter strategy:
Yeah, I decided that I wanted to just be clear in my mind the boundaries, so I just thought I'd do it quite logically by going after the furthest part the boundary and then I thought I'd work my way in (P4)
Yeah, I was going to start on the outskirts and gradually, when I got back to where I’d started, I was gonna go more inside rather than keeping to the outskirts. (P10)
I was trying to go around the outside of everything originally, to eliminate that to then go into the middle. (P25)
However, this was not the only strategy reported by participants. Some participants utilised a reference-point in the environment to keep track of where they had searched. For example, one participant noted that they would “have a starting point in the centre, to look, then go back to” (P25), and another explicitly referred to a “central reference point” (P34) which they used as a guide.
In contrast to previous research findings, one participant referred to a lawn mower strategy, insofar as “it’s like when you look for an item in the supermarket. You kind of stick to a strategy of going up one aisle and carrying on down the next so you don’t get confused” (P19). Another mentioned that they split the campus into quadrants: “I was just trying to quarter off the site, there was…uh… I was trying to walk one way and then the other way to make sure I didn’t miss any hiding spots” (P3). Some participants expressed that their plan was to avoid going back on themselves and repeating areas they had previously searched:
Don’t like go to the same area twice. As in, if you haven’t seen it there, you’re probably not going to see it there if that makes sense. (P5)
Well, it’s because I didn’t want to go back the same way I’d gone before. (P11)
Yeah, just so in my head I knew that I had looked there. There was no point going back on myself. (P19)
Other participants reported visually scanning the environment before walking, in order to find the most convenient or time-effective routes:
I thought that my eye could see it without having to actually physically walk it. (P22)
I was trying to get a view of everything, so I wouldn’t have to walk all the way in. Just do a quick glance. (P25)
Well, I didn’t want to walk all of the way back round there and all the way around again. (P3)
Some participants mentioned that they sought out the ‘main areas’ of the campus. For example, one noted that “I feel like it’s more likely to be in the main parts instead of just wasting time going around” (P14). And another noted that “I’d probably say visit the main buildings” (P27). Similarly, others were drawn to large, open spaces, reflecting that, for example, “it just looked open… so I thought that this would be a good place for a star to be hidden” (P30).
Although many participants reported adopting a particular strategy, others felt they were less strategic, instead choosing to follow their instincts when approaching the task:
Trust your instincts. I think sometimes when we get lost you get very flustered or something because we’re like, ah, this is not the right way, this is not the right way. But sometimes the way you’re going is the right way, you just feel like something is telling you it’s not when it is… Honestly, that’s what I did, I trusted my instincts. (P12)
Like, um, think about where you want to go because sometimes it is instinct to find the places. (P30)
I felt like I followed my… sense of my gut rather than, because originally, I was just going to go straight down to the end to make sure that I covered everything and then I was just like, no, I’ll just follow my gut instinct and then we ended up going that way. (P32)
A final group of participants did not even report relying on instinct, instead merely leaving their approach to chance. For example, one noted that “it was almost like luck. It was just kind of wandering round, and we’ll see” (P29), further reflecting that “yeah, sometimes you’re just vibing and it happens” (P29).
Altering initial plans
As our findings in the above sub-theme demonstrate, participants adopted a range of strategies during the search task. However, although many participants began the task with a particular strategy in place, many were not able to maintain these initial plans:
Yeah, so like I snake, up and down, but then because it’s an art university campus there isn’t a straightforward path to do snaking round and round. (P7)
My strategy failed me, so I give up at one point. (P12)
I tried to remember where everything was and then that kind of went out of the window a couple of minutes in. (P29)
[My plan was to] walk around the perimeter first and then you can exclude that, and they just start walking round the middle a bit more. That was what I was meant to do, but it didn’t work out. (P30)
There were many reasons given for these deviations. First, some participants reported that their lack of familiarity with their environment impacted their ability to search strategically. For example, one participant noted that “I got a bit disorientated… it was hard to remember which ways I’d been and which ways I hadn’t” (P22). A number of participants reflected that the complexity of the environment was unexpected, which contributed to their behaviour. One noted that “I didn’t know what was the outsides and what was the insides” (P25), and another similarly that “I thought I was on the outside [Laughs], but no, I went through the middle by accident” (P30), perhaps highlighting the difficulty of maintaining a perimeter strategy in the real world. One participant explicitly reflected that “in my head I was imagining it would all neatly lead back to a central place and it didn’t. So that threw me off a little bit” (P35).
Second, some participants began to doubt themselves as the task went on:
It was interesting and I was thinking where shall I look next and what route should I take, and I was thinking have I missed out bits or have I double backed on myself. (P9)
Yeah, and I think it began to go, within like the middle I began to start to doubt myself and I was just wandering a bit. (P20)
I was, at this point, reminding myself that I had never actually been here before. I was just, I was just doubting myself more. (P20)
Third, other participants became bored or frustrated with the task itself, leading them to disengage from their initial strategy. For example, one participant simply noted that “yeah, I got a little bit bored of going around, so I thought maybe it might be in here” (P14). Others linked their frustration to a sense of failure, insofar as “I was getting a bit frustrated and feeling like a bit of a failure, because I seemed to be taking a long time” (P9), with one stating that “I was kind of just grasping at straws, like I would have done anything at this point” (P25).
Using unique features
Although participants reported a range of strategies and did not necessarily maintain them throughout the task, several participants highlighted one important aspect: that they had identified unique features or landmarks within the environment which aided orientation. This manifested explicitly in one participant’s account, through the importance of “keeping an eye out for potential things to remember like landmarks or the colours of buildings” (P31). And in another, who reflected that “if you see something… you think won’t be repeated, make sure you look at it” (P29). Although the selected landmarks differed between participants, they each met the criteria set out by previous research that a landmark should be visible, permanent, and unique (Yesiltepe et al., 2021):
I recognised that stuff, because that’s near the big blue building. (P5)
But this was quite an obvious, I don’t know, it was quite a clear landmark bit, because of the change in the walls. (P10)
I recognised the birds from the student centre [picture] section. (P11)
I did notice the big blue building. I was just eyeing that back up again, I thought, oh. And you told me what it was. That was great. And then this way. I went straight in the centre. (P32)
In contrast to the usefulness of unique environmental features, some participants mistakenly referred to environmental features which were not unique, leading to feelings of disorientation. For example, one participant was confused by a recurring external staircase design: “I thought that I had already been down there, because the spiral staircase I thought was familiar… But I didn’t realise that that’s not the only spiral staircase” (P22). Another found that even more general environmental features, such as “the grass right there,” led them to get “completely… mixed up and [think] it was somewhere I had already been” (P25). This confusion was echoed by some participants who felt unable to hold onto anything unique within the environment, with one noting that “it felt like I just kept on seeing new things, and nothing that I could recognise, which completely made me just lose my bearings” (P25).
3.2.2 Environmental influences
The second theme – environmental influences – highlights the entanglement of the environment with the search task, which emerged in some of the discussion on strategies in the first theme. In particular, participants highlighted the influence of the aesthetic character of the environment and the role of other people. Within this theme we identified two subthemes: aesthetic exploration; and responding to other people.
Aesthetic exploration
When talking to participants it was evident that the appearance of the environment played a significant role in their decision making. Specifically, there was a definite preference amongst participants to explore areas that they deemed attractive:
Because I wanted to see the gardens. They just looked really pretty. (P11)
I just felt like this way looked more interesting to be honest. With all the trees. (P14)
I think I was honestly just drawn in by like, regardless of the task, that it was just visually pleasing, and I just wanted to explore it… regardless of whether I found the little star. (P34)
These aesthetic preferences extended in particular to the colour of the environment, with more colourful spaces being seen as appealing. For example, one participant stated that “I took that particular route because… it looked more interesting and colourful” (P9), another that “the colours were pretty cool and I wanted to explore it a bit more” (P19), and third that they were drawn down a pathway because of “the colours. It looks like something from Aladdin” (P11). One participant compared the attraction to the fact that in video games “every time there’s an item that’s very valuable, it’s always lit up and crazy. And this part’s a little like that” (P18). This focus on colour in particular accords with the previous sub-theme, using unique features. In this way, one could argue that the strategy of using unique features is a form of aesthetic exploration and thus that search strategies and environmental influences cannot be effectively disentangled.
Related to participant preferences for attractive spaces, one corner of the campus repelled rather than attracted searching activity due to its appearance. This area was mentioned in half of the analysed transcripts, with each participant mentioning that the appearance of the space dissuaded them from searching it further. One participant stated that “it just feels a bit too industrial. Like no one really goes down here” (P14). Whereas another noted that “I saw cars and metal looking buildings. That is my signal to avoid” (P8). A third stated simply that “it just didn’t look too appealing to me” (P27). One participant linked the unattractiveness of the area beyond the mere visual to a notion of socially constructed boundaries, noting that “I think because it felt like it was maybe out of bounds… like maybe it was no entry or something” (P22). Relating these reflections to the behavioural data, this was interestingly a location where participants stopped and looked around most frequently (See Figs. 3 and 4) but was not highlighted as a frequently used path (See Fig. 2).
Responding to other people
As we conducted our study in a real-world environment, it was inevitable that participants would encounter other people during the task. Two contrasting attitudes emerged about the influence of other people on search behaviours.
First, that the presence of people suggested that the area would be worth searching. Some participants conceived of this merely through the notion of curiosity: “I saw others sitting there. I think curiosity is what drew me down this way” (P12). Whereas others linked the presence of people to the notion of significance:
It’s more populated and I felt like there was a higher chance of finding something here. (P18)
Because, as there is a lot of people sat here, it feels like a significant part. Like it feels silly to skip it. (P27).
Second, the opposite was also proposed, with some participants suggesting that they were inclined to avoid more populated areas. In some instances, this was related to the attitude of the participant. For example, one noted that “there were also people waiting outside and I didn’t really want to go past them” (P5). And another simply noted that “I probably didn’t pick it because it just looked too busy” (P9). In other cases, however, this was related to the idea that busier places would make searching more difficult or that the target would not be placed there:
I would have bumped into more people, and it would have made it much harder to search. So, I was like let’s take the less used pathway. (P11).
I think because I saw loads of people. I always think if there’s like blatantly big areas where I know there’s going to be lots of people, it will definitely not be there. (P12)
These contradictory findings on the influence of other people on searching accord with previous research, which suggests that reactions to other people are difficult to predict as they are highly individualised and contextual (Li et al., 2019).
4 Discussion
In this study we utilised a phenomenologically informed experiment to investigate how people search unfamiliar environments. We replicated Büchner et al.’s (2009) experimental design but in a complex, real-world built environment. In addition, we incorporated interviews which have the potential to reveal the cognitive strategies that influence everyday navigation in complex-built environments (Hölscher et al., 2006; Spiers & Maguire, 2006, 2008; Tenbrink & Wiener, 2007).
In line with Büchner et al. (2009), we expected that participants would find target objects at the perimeter quicker than in the centre. Our behavioural data, however, did not support this hypothesis as search time and route length did not differ between conditions. The most obvious difference between our study and that of Büchner et al. (2009) was that we utilised a real-world environment rather than a complex virtual environment. The environments were very different, with Büchner and colleagues constructing empty virtual mazes designed to focus participants’ attention on the geometrical features of the environment. In contrast, our environment was incredibly varied, full of multisensory cues and representative of a typical, real-world environment (Park et al., 2018). We discuss how features of the real-world environment influenced search strategies in more detail below.
Interestingly, despite no support from the behavioural data, the interview data suggests that many participants used or intended to use the perimeter strategy. In fact, although explicit or implicit references were made to all three search strategies previously described (central-point, grid-like/lawn mower, and perimeter strategy; Tellevik, 1992), the perimeter strategy was referred to most frequently. In contrast, however, the interviews also highlighted reasons why the perimeter strategy may have failed. For example, some participants found it difficult to understand where the perimeter was, with some meaning to walk along the perimeter but then realising that they went through the centre. Moreover, some participants mentioned that they tried to implement the perimeter strategy but realised at some point that it had failed and then switched to another strategy. In the context of this study, these findings highlight an important issue. Namely, that when searching in unfamiliar complex real-world settings, people frequently probe and switch between search strategies based on local environmental characteristics, highlighting a complex and dynamic interplay of strategies and the situations in which they are deployed. This issue questions the dominant cognitivist assumption in much wayfinding research that environmental factors should be treated as mere stimuli for internally conceived mechanisms, instead suggesting that the environment might be better conceived as entangled with (perhaps even constitutive of) the cognitive processes involved in searching (van Woerkum, 2023). Although we do not want to wade into the messy debate on the purported role of representational cognition in wayfinding more generally, our findings suggest that non-cognitive frameworks currently under-utilised in wayfinding research – such as Gibsonian affordances (Gibson, 1979/2015) and some enactivist accounts (e.g., Thompson (2010) – could, in particular, prove fruitful in making sense of uninformed searching.
Furthermore, our findings suggest that results from well-controlled laboratory navigation experiments, although perhaps informative for specific strategies and mechanisms, do not straightforwardly translate to real world situations, even if the same experimental manipulation and logic is applied. Finally, the inclusion of qualitative approaches, in this case walking interviews, has the potential to reveal intricacies of the cognitive processes and strategies involved in human wayfinding behaviour that is difficult, if not impossible, to study in pure behavioural experiments (see also Spiers & Maguire, 2006, 2008).
Beyond the more general focus on the importance of environmental features, outlined above, one particular aspect was foregrounded in our findings: participants reported that the aesthetic appearance of the environment played an influential role in their decision-making. This was particularly evident in one corner of the campus, which acted as a hotspot for participants stopping and looking around. Importantly, it was also where participants consistently chose to follow a more central pathway rather than persevering and continuing along the perimeter. Participants reported that they were deterred from further exploration by the industrial appearance of the space, finding it visually unappealing and not worth searching. The opposite effect was found for more appealing areas of the environment which seemed to attract participants. While it is known that aesthetic factors impact wayfinding, for example when planning trips and aiming for scenic routes (Alivand et al., 2015), to our knowledge this is the first time that the aesthetic appearance of the environment has been shown to affect search behaviour in an experiment. Our specific observations about the importance of aesthetic appearance provide further support for the notion, introduced above, that environmental features are not just external stimuli but actively afford organisms certain possibilities for action. This, again, questions the dominance of cognitivist frameworks underpinning much wayfinding research, in which the active and entangled role of the environment is under-emphasised.
The entanglement of the environment with wayfinding processes was further evidenced by the influence of uncontrollable elements, most notably other people. Participants’ search choices were influenced by the presence of other people, and this was reflected in their interviews. Consistent with previous research, it seemed that witnessing other people in the environment either drew the participant to the space or compelled them to avoid it (Li et al., 2019). In either case, the presence of people in the environment influenced participants’ search behaviour and wayfinding decisions. It is particularly interesting to note that some participants argued that the presence of people indicated that this part of the environment was significant, which supports the argument that social aspects of wayfinding are important but greatly under-researched (Dalton et al., 2019).
Notably, the entanglement of the environment with wayfinding processes accords with findings from the few studies in which wayfinding has been investigated outside the laboratory (e.g., Heft, 2013; Hutchins, 1995). For example, Hutchins’ (1995) famous study of naval navigation, in which his cognitive ethnographic approach found that navigational processes were best understood as distributed across environmental structures, material artifacts, other crew members, and time. These findings accord with our wider conceptual concerns about the dominance of laboratory-based wayfinding research, and the cognitivist paradigm in which most of such research is conducted. In particular, the concern that such an approach unnecessarily bounds the limits of what we conceive of as cognition, perhaps at the cost of understanding the phenomenon in question (Hardman, 2022; Heft, 2013).
4.1 Strengths and limitations
The utilisation of a real-world environment allowed us to study how people search unfamiliar environments in an ecologically valid way. However, although real-world environments can arguably provide the most realistic representation of wayfinding behaviours, they are susceptible to the impact of extraneous variables (Eberhardt & Thomas, 1991). For example, although the lack of difference between the two experimental conditions could be a consequence of our decision to use a real-world environment, it is possible that other factors one cannot control for in real world environment – such as that participants in the centre condition could have been exposed to more distractions – were important. However, although it is useful to recognise this limitation, it is also important to consider whether the benefits outweigh the costs. It is very possible that the removal of extraneous variables – even if it were practically possible – would have limited our ability to understand participants’ search choices within the context of the real-world (Maner, 2016). Moreover, given that factors framed by experimental psychologists as “extraneous variables” are in fact just natural aspects of real-world environments, one could argue that there is no good argument to exclude them in the first place.
5 Conclusion
Using a phenomenologically informed experiment, this study demonstrates the importance of environmental factors when searching in an unfamiliar space. Specifically, our results reveal that searching in complex real-world settings depends on a complex and dynamic interplay of different search strategies and the situations in which they are deployed. We have shown that the presence of other people and aesthetic considerations are importantly entangled with the process of searching, and that people frequently probe and switch between search strategies based on local environmental characteristics. We believe that our study demonstrates that there is significant value in studying wayfinding behaviour beyond the laboratory, using a range of quantitative and qualitative methodologies. Given the current lack of diversity in current wayfinding research, this, we argue, presents an exciting opportunity to expand our knowledge about human wayfinding.
References
Ahmed, S., Muhammad, I. B., Anakobe, A., Momoh, I., & Sani, A. (2020). Influence of spatial layout on wayfinding behaviour in hospital environment in Nigeria. Architecture and Built Environment (JAABE), 3(1), 2617–2704. https://doi.org/10.32350/jaabe
Alivand, M., Hochmair, H., & Srinivasan, S. (2015). Analyzing how travelers choose scenic routes using route choice models. Computers, Environment and Urban Systems, 50, 41–52. https://doi.org/10.1016/j.compenvurbsys.2014.10.004
Braun, V., & Clarke, V. (2006). Using thematic analysis in psychology. Qualitative Research in Psychology, 3(2), 77–101. https://doi.org/10.1191/1478088706qp063oa
British Psychological Society. (2021). BPS Code of Human Research Ethics. https://www.bps.org.uk/guideline/bps-code-human-research-ethics
Büchner, S. J., Hölscher, C., & Wiener, J. (2009). Search strategies and their success in a virtual maze. Proceedings of the Annual Meeting of the Cognitive Science Society, 31(31), 1066–1071.
Cao, Y., Heng, C. K., & Fung, J. C. (2019). Using walk-along interviews to identify environmental factors influencing older adults’ out-of-home behaviors in a high-rise, high-density neighborhood. International Journal of Environmental Research and Public Health, 16(21). https://doi.org/10.3390/ijerph16214251
Coutrot, A., Schmidt, S., Coutrot, L., Pittman, J., Hong, L., et al. (2019). Virtual navigation tested on a mobile app is predictive of real-world wayfinding navigation performance. PLoS One, 14(3), e0213272. https://doi.org/10.1371/journal.pone.0213272
Dalton, R. C., Hölscher, C., & Montello, D. R. (2019). Wayfinding as a social activity. Frontiers in Psychology, 10, 142. https://doi.org/10.3389/fpsyg.2019.00142
Design Engine Architects. (n.d.). [Arts University Bournemouth campus map]. Retrieved 11th August 2022, from https://www.designengine.co.uk/projects/aub-masterplan/
Dezeen. (n.d.). [Arts University Bournemouth campus map]. Retrieved 11th August 2022, from https://www.dezeen.com/2016/03/04/peter-cook-crab-drawing-studio-arts-university-bournemouth-bright-blue-first-building-uk/
Eberhardt, L. L., & Thomas, J. M. (1991). Designing environmental field studies. In Source: Ecological Monographs (Vol. 61, Issue 1). http://www.jstor.org, URL:http://www.jstor.org/stable/1942999
Feest, U. (2021). Gestalt psychology, frontloading phenomenology, and psychophysics. Synthese, 198(9), 2153–2173.
Gallagher, S. (2003). Phenomenology and experimental design: Toward a phenomenologically enlightened experimental science. Journal of Consciousness Studies, 10(9–10), 85–99.
Gibson, J. J. (1979/2015). The ecological approach to visual perception. Psychology Press.
Gilchrist, I. D., North, A., & Hood, B. (2001). Is visual search really like foraging? Perception, 30(12), 1459–1464. https://doi.org/10.1068/p3249
Google. (n.d.). [Google maps Arts University Bournemouth campus]. Retrieved 12th July 2022, from https://www.google.co.uk/maps/place/Arts+University+Bournemouth/@50.7421804,1.8983836,539m/data=!3m3!1e3!4b1!5s0x4873a1860653efdf:0xbd9a5d6a1cb18e43!4m5!3m4!1s0x4873a188c97c4dcb:0x94ab91f16aa58ef6!8m2!3d50.7421804!4d-1.8961949
Hardman, D. (2022). Three simple rules for good cognitive science. Cognitive Science, 46(7), e13172.
Hartley, T., Maguire, E. A., Spiers, H. J., & Burgess, N. (2003). The well-worn route and the path less traveled: Distinct neural bases of route following and wayfinding in humans. Neuron, 37(5), 877–888. https://doi.org/10.1016/s0896-6273(03)00095-3
Heft, H. (2013). Environment, cognition, and culture: Reconsidering the cognitive map. Journal of Environmental Psychology, 33, 14–25.
Hölscher, C., Meilinger, T., Vrachliotis, G., Brösamle, M., & Knauff, M. (2006). Up the down staircase: Wayfinding strategies in multi-level buildings. Journal of Environmental Psychology, 26(4), 284–299. https://doi.org/10.1016/j.jenvp.2006.09.002
Hutchins, E. (1995). Cognition in the wild. MIT Press.
Ito, K., & Sano, Y. (2011). Cultural differences in the use of spatial information in wayfinding behavior. Proceedings of the 25th International Cartographic Conference.
Kinney, P. (2017). Walking interviews. Social Research Update, 67, 1–4.
Li, H., Thrash, T., Hölscher, C., & Schinazi, V. R. (2019). The effect of crowdedness on human wayfinding and locomotion in a multi-level virtual shopping mall. Journal of Environmental Psychology, 65. https://doi.org/10.1016/j.jenvp.2019.101320
Maner, J. K. (2016). Into the wild: Field research can increase both replicability and real-world impact. Journal of Experimental Social Psychology, 66, 100–106. https://doi.org/10.1016/j.jesp.2015.09.018
Montello, D. R. (2005). Navigation. Cambridge University Press.
Montello, D. R. (1993). Scale and Multiple Psychologies of Space. In A. U. Frank & I. Campari (Eds.), European conference on spatial information theory (Vol. 716, pp. 312–321).
O’Malley, M., Innes, A., & Wiener, J. M. (2022). (Dis)orientation and design preferences within an unfamiliar care environment: A content analysis of older adults’ qualitative reports after route learning. Environment and Behavior, 54(1), 116–142. https://doi.org/10.1177/0013916520953148
Park, J. L., Dudchenko, P. A., & Donaldson, D. I. (2018). Navigation in real-world environments: New opportunities afforded by advances in mobile brain imaging. In Frontiers in Human Neuroscience (Vol. 12). Frontiers Media S.A. https://doi.org/10.3389/fnhum.2018.00361
Riggs, C. A., Cornes, K., Godwin, H. J., Liversedge, S. P., Guest, R., & Donnelly, N. (2017). The importance of search strategy for finding targets in open terrain. Cognitive Research: Principles and Implications, 2(1). https://doi.org/10.1186/s41235-017-0049-4
Rousek, J. B., & Hallbeck, M. S. (2011). The use of simulated visual impairment to identify hospital design elements that contribute to wayfinding difficulties. International Journal of Industrial Ergonomics, 41(5), 447–458. https://doi.org/10.1016/j.ergon.2011.05.002
Ruddle, R. A., & Lessels, S. (2006). For efficient navigational search, humans require full physical movement, but not a rich visual scene. Psychological Science, 17(6), 460–465. https://doi.org/10.1111/j.1467-9280.2006.01728.x
Smith, A. D., Hood, B. M., & Gilchrist, I. D. (2008). Visual search and foraging compared in a large-scale search task. Cognitive Processing, 9(2), 121–126. https://doi.org/10.1007/s10339-007-0200-0
Spiers, H. J., & Maguire, E. A. (2006). Thoughts, behaviour, and brain dynamics during navigation in the real world. NeuroImage, 31(4), 1826–1840. https://doi.org/10.1016/j.neuroimage.2006.01.037
Spiers, H. J., & Maguire, E. A. (2008). The dynamic nature of cognition during wayfinding. Journal of Environmental Psychology, 28(3), 232–249. https://doi.org/10.1016/j.jenvp.2008.02.006
Stals, S., Smyth, M., & IJsselsteijn, W. (2014). Walking & talking: Probing the urban lived experience. Proceedings of the NordiCHI 2014: The 8th Nordic Conference on Human-Computer Interaction: Fun, Fast, Foundational, 737–746. https://doi.org/10.1145/2639189.2641215
Tenbrink, T., & Wiener, J. M. (2007). Wayfinding strategies in behavior and language: A symmetric and interdisciplinary approach to cognitive Processes. Spatial Cognition V Reasoning, Action, Interaction, 401–420. https://doi.org/10.1007/978-3-540-75666-8_23
Tellevik, J. (1992). Influence of spatial exploration patterns of cognitive mapping by blindfolded sighted persons. Journal of Visual Impairment & Blindness, 92, 221–224.
Thomas, D. R. (2006). A general inductive approach for analyzing qualitative evaluation data. American Journal of Evaluation, 27(2), 237–246. https://doi.org/10.1177/1098214005283748
Thompson, E. (2010). Mind in life: Biology, phenomenology, and the sciences of mind. Harvard University Press.
van Woerkum, B. (2023). Animal navigation without mental representation. Phenomenology and the Cognitive Sciences. https://doi.org/10.1007/s11097-023-09940-z
Waller, D., & Lippa, Y. (2007). Landmarks as beacons and associative cues: Their role in route learning. Memory & Cognition, 35(5), 910–924. https://doi.org/10.3758/BF03193465
Wiener, J. M., Büchner, S. J., & Hölscher, C. (2009). Taxonomy of human wayfinding tasks: A knowledge-based approach. Spatial Cognition and Computation, 9(2), 152–165. https://doi.org/10.1080/13875860902906496
Wolbers, T., & Hegarty, M. (2010). What determines our navigational abilities? Trends in Cognitive Sciences, 14(3), 138–146.
Yesiltepe, D., Conroy Dalton, R., & Ozbil Torun, A. (2021). Landmarks in wayfinding: a review of the existing literature. In Cognitive Processing (Vol. 22, Issue 3, pp. 369–410). Springer Science and Business Media Deutschland GmbH. https://doi.org/10.1007/s10339-021-01012-x
Zahavi, D. (2019). Getting it quite wrong: Van Manen and Smith on phenomenology. Qualitative Health Research, 29(6), 900–907.
Funding
None.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that there is no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Alcock, M., Wiener, J.M. & Hardman, D. Searching in an unfamiliar environment: a phenomenologically informed experiment. Phenom Cogn Sci (2024). https://doi.org/10.1007/s11097-024-09960-3
Accepted:
Published:
DOI: https://doi.org/10.1007/s11097-024-09960-3